
|
在学习和工作期间,在团队的共同努力下,我们参与了很多自动驾驶相关竞赛并获得不错的成绩,也曾经参与过一些顶会文章。 你可以通过以下方式 了解 & 联系 我
|
|
我从事自动驾驶行业感知技术相关工作。擅长基于深度学习2D & 3D目标检测、跟踪、分割等视觉任务。曾参与、设计并实现多种SOTA的视觉方法。曾多次参加自动驾驶挑战赛(实车&仿真竞赛)和相关视觉任务竞赛(like CVPR challenge),在团队协作下获得不错的成绩。
此外,具备深度学习方法的落地部署经验,TensorRT加速SNPE量化等。熟悉NV平台的自定义算子实现,CUDA并行加速等。 |
|
|
|
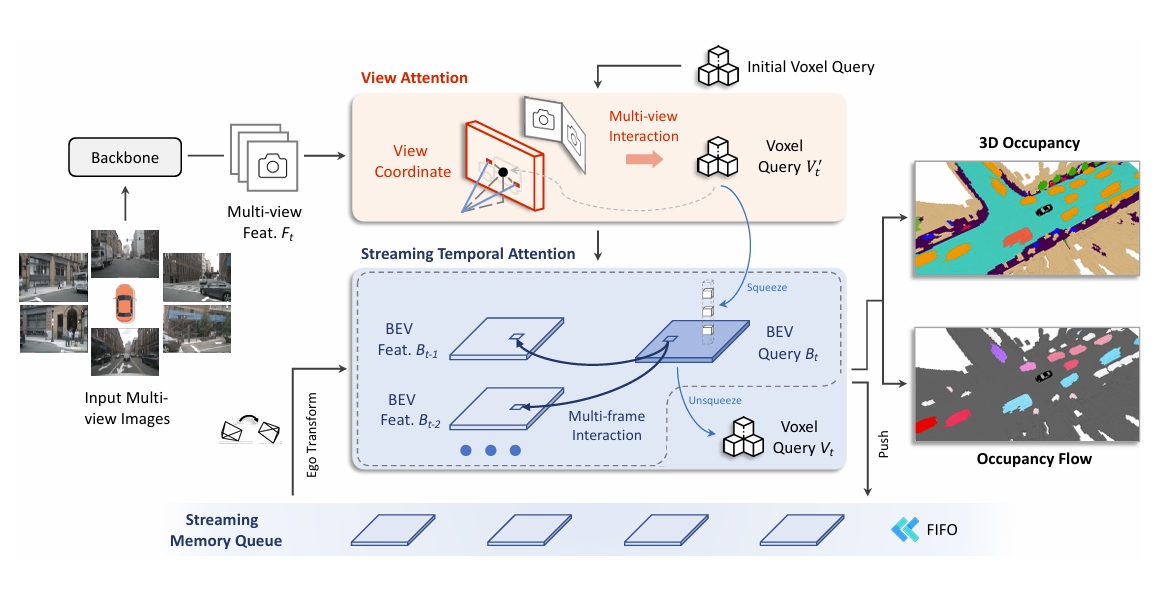
Jinke Li⁎, ..., Xiaoqiang Cheng In European Conference on Computer Vision (ECCV) , 2024 paper 一种高效的基于时序特征的占用网络预测方法,我们提出了View-based att. 和更细粒度的OCC flow任务 |
|
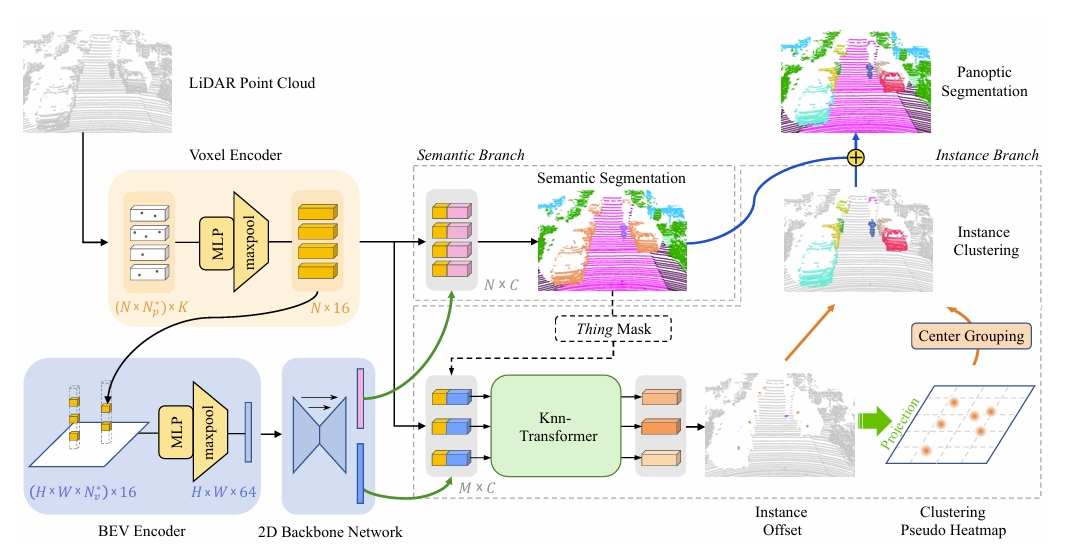
Jinke Li⁎, ..., Xiaoqiang Cheng In Computer Vision and Pattern Recognition (CVPR) , 2022 paper 这是一个高精度且实时的点云全景分割网络,我们在nuscenes和KITTI数据集上取得了SOTA |
|
|
- 程晓强,等. 目标匹配方法、装置、设备及存储介质[P]. 北京市:CN202111474736.9
- 程晓强,等. 多目标匹配方法、装置、电子设备和存储介质[P]. 北京市:CN202211562631.3
- 程晓强,等. 闸机开度检测方法、装置、设备、介质及车辆[P]. 北京市:CN202211184169.8
- 程晓强,等. 目标检测方法、装置、电子设备和存储介质[P]. 北京市:CN202310583887.0
- 程晓强,等. 非极大值抑制方法、装置、电子设备和存储介质[P]. 北京市:CN202311733978.4
- 程晓强,等. USEG点云语义分割标注系统[CP]. 北京市: 2024SR0534619
|
|
- 2024 ICRA RoboDrive Challenge Robust Occpancy Prediction 1st Place
- 2021 NeurIPS Panoptic nuScenes challenge 1st Place
- 2020 年第四届世界智能驾驶挑战赛决赛一等奖
- 2017 年“瑞萨杯”全国大学生电子设计竞赛二等奖
- 2016 年国际ICAN创新创业大赛全国二等奖
- 2016 年河北省“TI杯”电子设计竞赛二等奖
|
Copyright@Xiaoqiang Cheng 2024. Template is modified from Jonbarron. |